 |
2. LES GRAPHES TEMPORELS |
Dans le premier chapitre, nous avons exposé quelques problèmes de synchronisation hypermédia (inter-média plus précisément) liés à la réalisabilité et à l'optimisation d'une planification pour la présentation synchronisée d'objets multimédia. Nous présentons ici une modélisation sous forme de graphe. Celle-ci ne permet pas de représenter toutes les spécifications désirées par les auteurs de documents hypermédia synchronisés, mais tente néanmoins d'en rassembler les principales. Travaillant en collaboration avec les concepteurs d'HyperProp (cf. [Soares00]), le choix des spécifications à prendre en compte dans notre modélisation a fortement été guidée par leurs besoins.
Mais avant d'étudier cette modélisation, il nous semble nécessaire de consacrer une section à l'introduction de notions et de propriétés élémentaires sur les graphes indispensables pour la compréhension du document et éventuellement pour intégrer les algorithmes des prochains chapitres dans un logiciel de conception et/ou de présentation de documents hypermédia synchronisés. Après quelques rappels très généraux sur les graphes, nous introduisons les notions de flot et de tension. Nous verrons dans les chapitres suivants qu'une relation très forte entre le flot et la tension, la dualité, joue un rôle très important dans les méthodes de résolution que nous présentons.
Après cette introduction, nous présentons la modélisation sous forme de graphe retenue, et précisons les restrictions qu'elle impose. Nous montrons ensuite que les problèmes de synchronisation hypermédia peuvent ainsi être considérés comme des problèmes de tension dans un graphe. En particulier, nous discutons de la pertinence des problèmes de la tension compatible et de la tension de coût minimal pour l'aspect hypermédia, et pour lesquels nous présentons des méthodes de résolution dans la seconde partie du mémoire. Nous exposons finalement différentes manières de mesurer la qualité d'une planification qui semblent significatives pour les auteurs de documents hypermédia, toutes ne seront pas abordées par la suite.
| 2.1. INTRODUCTION AUX GRAPHES |
Cette section nous a semblé nécessaire pour rassembler les notions de base concernant les graphes. Le lecteur novice dans ce domaine y trouvera tous les éléments indispensables au suivi des chapitres suivants du mémoire. Pour le lecteur plus confirmé, il est possible d'utiliser cette section comme référence pour une définition ou un théorème.
En complément, nous proposons également un annexe qui regroupe des algorithmes dont le détail est jugé peu important dans le flot de nos réflexions, mais néanmoins utile notamment pour l'interprétation et la reproduction des résultats numériques. Cette section introduit aussi quelques propriétés nécessaires pour la génération aléatoire de problèmes pour nos jeux d'essais dont les principaux algorithmes sont détaillés dans l'annexe.
Une remarque importante sur la notation employée tout au long de ce document: les
fonctions dont le domaine de définition est discret et fini (e.g. un ensemble d'arcs ou de
noeuds) seront souvent utilisées comme des vecteurs. Ainsi une fonction
![]() pourra être considérée comme un vecteur
pourra être considérée comme un vecteur
![]() dont les composantes seront notées
dont les composantes seront notées
![]() .
.
| 2.1.1. Notions élémentaires |
| 2.1.1.1. Graphe |
Pour illustrer les définitions présentées ici, nous allons utiliser le
graphe représenté par la figure 2.1, noté
![]() , où
, où
![]() est l'ensemble des noeuds et
est l'ensemble des noeuds et
![]() est l'ensemble des arcs. Nous notons
est l'ensemble des arcs. Nous notons
![]() le nombre de noeuds de
le nombre de noeuds de
![]() et
et
![]() le nombre d'arcs.
le nombre d'arcs.
Ce graphe est orienté, cela signifie qu'une distinction est faite entre les deux
extrémités (i.e. les noeuds) d'un arc. On appelle noeud origine le noeud
d'où part l'arc et noeud destination le noeud où arrive l'arc. Ainsi pour un
noeud
![]() , on appelle arcs entrants tous les arcs ayant
, on appelle arcs entrants tous les arcs ayant
![]() pour noeud origine et arcs sortants tous les arcs ayant
pour noeud origine et arcs sortants tous les arcs ayant
![]() comme noeud destination.
comme noeud destination.
Nous désignerons souvent un arc
![]() de source
de source
![]() et de destination
et de destination
![]() par le couple
par le couple
![]() , bien que cette notation soit abusive dans la mesure où plusieurs arcs peuvent
avoir même origine
, bien que cette notation soit abusive dans la mesure où plusieurs arcs peuvent
avoir même origine
![]() et destination
et destination
![]() . Dans un tel cas
. Dans un tel cas
![]() est appelé un arc multiple. Un multigraphe est un graphe
possédant au moins un arc multiple.
est appelé un arc multiple. Un multigraphe est un graphe
possédant au moins un arc multiple.
On désignera par sens direct l'utilisation d'un arc dans le sens origine-destination et par sens indirect son utilisation dans le sens destination-origine.
 |
| Figure 2.1: Un exemple de graphe. |
Le degré sortant, noté
![]() , d'un noeud
, d'un noeud
![]() est le nombre de ses arcs sortants et son degré entrant, noté
est le nombre de ses arcs sortants et son degré entrant, noté
![]() , est le nombre de ses arcs entrants. Le degré d'un noeud est la somme de
ses degrés sortant et entrant. Un noeud dont le degré entrant est nul est
appelé noeud source du graphe. De même, un noeud dont le degré sortant
est nul est appelé noeud puits du graphe.
, est le nombre de ses arcs entrants. Le degré d'un noeud est la somme de
ses degrés sortant et entrant. Un noeud dont le degré entrant est nul est
appelé noeud source du graphe. De même, un noeud dont le degré sortant
est nul est appelé noeud puits du graphe.
| 2.1.1.2. Chaîne et chemin |
On dit que deux arcs sont adjacents s'ils ont au moins une extrémité (le noeud origine ou le noeud destination) en commun. Un noeud est adjacent à un arc s'il est au moins l'une des deux extrémités de l'arc.
On désigne par chaîne une succession d'arcs
![]() dans un graphe telle que deux arcs consécutifs dans la chaîne sont
adjacents dans le graphe. Si l'on considère une chaîne
dans un graphe telle que deux arcs consécutifs dans la chaîne sont
adjacents dans le graphe. Si l'on considère une chaîne
![]() , on notera
, on notera
![]() l'ensemble des arcs qui sont dans le sens de parcours et
l'ensemble des arcs qui sont dans le sens de parcours et
![]() l'ensemble des arcs qui sont dans le sens opposé.
l'ensemble des arcs qui sont dans le sens opposé.
On appelle chemin une chaîne dont les arcs sont tous orientés dans le même sens, i.e. pour deux arcs consécutifs, le noeud destination du premier est le noeud source du second.
On désigne par chaîne élémentaire (respectivement chemin élémentaire) une chaîne (respectivement un chemin) qui ne passe qu'une seule fois par un même noeud.
D'après la figure 2.1, voici quelques exemples de chaînes et de chemins.
-
 est une chaîne (pas élémentaire),
est une chaîne (pas élémentaire),
-
 est une chaîne élémentaire,
est une chaîne élémentaire,
-
 est un chemin (pas élémentaire),
est un chemin (pas élémentaire),
-
 est un chemin élémentaire.
est un chemin élémentaire.
| 2.1.1.3. Cycle et circuit |
On appelle cycle une chaîne non vide telle que le noeud de départ et le
noeud d'arrivée sont identiques (e.g. le cycle
![]() dans la figure 2.2). Si l'on considère un cycle
dans la figure 2.2). Si l'on considère un cycle
![]() et qu'on lui choisit arbitrairement un sens de parcours, on notera
et qu'on lui choisit arbitrairement un sens de parcours, on notera
![]() l'ensemble des arcs qui sont dans ce sens de parcours et
l'ensemble des arcs qui sont dans ce sens de parcours et
![]() l'ensemble des arcs qui sont dans le sens opposé. Si tous les arcs sont dans le
même sens, le cycle est appelé un circuit.
l'ensemble des arcs qui sont dans le sens opposé. Si tous les arcs sont dans le
même sens, le cycle est appelé un circuit.
Comme les chaînes et les chemins, un cycle
élémentaire (respectivement un circuit élémentaire) est un
cycle (respectivement un circuit) qui ne passe qu'une seule fois par un même noeud. Pour des
facilités d'écriture, un cycle élémentaire noté
![]() pourra être considéré comme un vecteur d'entiers, ses composantes
seront notées
pourra être considéré comme un vecteur d'entiers, ses composantes
seront notées
![]() pour tout arc
pour tout arc
![]() du graphe
du graphe
![]() , telles que:
, telles que:
Dans la figure 2.2, le cycle
![]() peut être représenté par le vecteur
peut être représenté par le vecteur
![]() , en supposant les arcs dans l'ordre
, en supposant les arcs dans l'ordre
![]() .
.
 |
| Figure 2.2: Un exemple de cycle. |
Si un graphe est sans cycle, alors
![]() (cette propriété se démontre facilement par
récursivité sur la taille du graphe).
(cette propriété se démontre facilement par
récursivité sur la taille du graphe).
| 2.1.1.4. Cocycle et cocircuit |
Soit
![]() un sous-ensemble des noeuds de
un sous-ensemble des noeuds de
![]() . On note
. On note
![]() le cocycle de
le cocycle de
![]() . Il s'agit de l'ensemble des arcs de
. Il s'agit de l'ensemble des arcs de
![]() qui ont une extrémité dans
qui ont une extrémité dans
![]() et l'autre dans
et l'autre dans
![]() , i.e. les noeuds qui ne sont pas dans
, i.e. les noeuds qui ne sont pas dans
![]() (e.g. le cocycle
(e.g. le cocycle
![]() dans la figure 2.3).
dans la figure 2.3).
L'ensemble
![]() peut être séparé en deux sous-ensembles:
peut être séparé en deux sous-ensembles:
![]() qui contient les arcs du cocycle qui ont leur source dans
qui contient les arcs du cocycle qui ont leur source dans
![]() , et
, et
![]() qui contient ceux qui ont leur destination dans
qui contient ceux qui ont leur destination dans
![]() . Si tous les arcs sont dans le
même sens, le cocycle est appelé un cocircuit.
. Si tous les arcs sont dans le
même sens, le cocycle est appelé un cocircuit.
 |
| Figure 2.3: Un exemple de cocycle. |
De la même manière que le cycle, un cocycle noté
![]() pourra être considéré comme un vecteur d'entiers, ses composantes
seront notées
pourra être considéré comme un vecteur d'entiers, ses composantes
seront notées
![]() pour tout arc
pour tout arc
![]() du graphe
du graphe
![]() , telles que:
, telles que:
Dans la figure 2.3, le cocycle
![]() peut être représenté par le vecteur
peut être représenté par le vecteur
![]() , en supposant les arcs dans l'ordre
, en supposant les arcs dans l'ordre
![]() .
.
| 2.1.2. Arbre |
| 2.1.2.1. Connexité et forte connexité |
Deux noeuds
![]() et
et
![]() sont connectés si et seulement s'il existe une chaîne entre
sont connectés si et seulement s'il existe une chaîne entre
![]() et
et
![]() ou bien
ou bien
![]() . Un graphe est dit connexe si et seulement si tous ses noeuds sont
connectés deux à deux.
. Un graphe est dit connexe si et seulement si tous ses noeuds sont
connectés deux à deux.
Deux noeuds
![]() et
et
![]() sont fortement connectés si et seulement s'il existe un chemin de
sont fortement connectés si et seulement s'il existe un chemin de
![]() à
à
![]() et un chemin de
et un chemin de
![]() à
à
![]() , ou bien
, ou bien
![]() . Un graphe est dit fortement connexe si et seulement si tous ses noeuds sont
fortement connectés deux à deux.
. Un graphe est dit fortement connexe si et seulement si tous ses noeuds sont
fortement connectés deux à deux.
Si le graphe
![]() est connexe, alors
est connexe, alors
![]() (cette propriété se démontre aisément par
récursivité sur la taille du graphe).
(cette propriété se démontre aisément par
récursivité sur la taille du graphe).
On appelle composante connexe (respectivement composante fortement connexe) un ensemble de noeuds dont tous les noeuds sont connectés (respectivement fortement connectés) deux à deux et tout noeud extérieur à la composante n'est pas connecté (respectivement fortement connecté) à aucun noeud de la composante.
Pour exemple, le graphe de la figure 2.1 est connexe, mais pas fortement connexe. En revanche,
la composante
![]() est fortement connexe.
est fortement connexe.
| 2.1.2.2. Sous-graphe et graphe partiel |
Soit un graphe
![]() , le sous-ensemble de noeuds
, le sous-ensemble de noeuds
![]() , et les sous-ensembles d'arcs
, et les sous-ensembles d'arcs
![]() et
et
![]() . Voici la définition de graphes qui peuvent être formés à
partir de ces ensembles.
. Voici la définition de graphes qui peuvent être formés à
partir de ces ensembles.
- Le graphe
 est appelé sous-graphe de
est appelé sous-graphe de
 . Autrement dit, un sous-graphe de
, c'est
privé de quelques noeuds et des arcs adjacents à ces noeuds.
. Autrement dit, un sous-graphe de
, c'est
privé de quelques noeuds et des arcs adjacents à ces noeuds.
- Le graphe
 est appelé graphe partiel de
. Autrement dit, un graphe partiel de
, c'est
privé de quelques arcs.
est appelé graphe partiel de
. Autrement dit, un graphe partiel de
, c'est
privé de quelques arcs.
| 2.1.2.3. Arbre et arbre recouvrant |
Un arbre est un graphe connexe sans cycle. De cette définition découlent les propriétés suivantes.
- Tous les noeuds d'un arbre sont reliés par une chaîne (grâce à la connexité) et une seule (sinon deux chaînes formeraient un cycle).
- Un arbre à
 sommets contient exactement
sommets contient exactement
 arcs (car connexe signifie
arcs (car connexe signifie
 et sans cycle signifie
et sans cycle signifie
 ).
).
- Un arbre possède au moins deux noeuds de degré 1 (cette propriété se vérifie facilement par récursivité sur la taille de l'arbre).
- L'ajout d'un seul arc dans un arbre introduit un cycle (car
 devient supérieur à
).
devient supérieur à
).
- La suppression d'un seul arc dans un arbre introduit deux composantes connexes (car
devient inférieur à
).
 |
| Figure 2.4: Un exemple d'arbre recouvrant. |
On appelle arbre recouvrant d'un graphe
![]() un arbre
un arbre
![]() tel que
tel que
![]() . Autrement dit, un arbre recouvrant de
. Autrement dit, un arbre recouvrant de
![]() est un graphe partiel connexe de
est un graphe partiel connexe de
![]() sans cycle. Le graphe de la figure 2.4 est un arbre recouvrant du graphe de la figure
2.1. Un algorithme de recherche d'arbre recouvrant dans un graphe est détaillé dans
l'annexe.
sans cycle. Le graphe de la figure 2.4 est un arbre recouvrant du graphe de la figure
2.1. Un algorithme de recherche d'arbre recouvrant dans un graphe est détaillé dans
l'annexe.
| 2.1.2.4. Arbre binaire |
Un noeud
![]() est une racine du graphe
est une racine du graphe
![]() si pour tout noeud
si pour tout noeud
![]() de
de
![]() il existe un chemin de
il existe un chemin de
![]() à
à
![]() . Un arbre de racine
. Un arbre de racine
![]() est appelé une arborescence de racine
est appelé une arborescence de racine
![]() .
.
En particulier, nous empruntons le terme arbre binaire au domaine des structures de
données pour la suite de ce document. Il désigne une arborescence pour laquelle tous
les noeuds ont un degré entrant égal à
![]() (exceptée la racine pour laquelle c'est
(exceptée la racine pour laquelle c'est
![]() ) et un degré sortant d'au plus
) et un degré sortant d'au plus
![]() . Un exemple est montré par la figure 2.5.
. Un exemple est montré par la figure 2.5.
 |
| Figure 2.5: Un exemple d'arbre binaire. |
En partant de la racine et en suivant les arcs dans le sens direct de gauche à droite,
une arborescence représente un ordre sur les noeuds. Nous proposons ainsi une notation
récursive des arbres binaires. Supposons
![]() la racine d'un arbre binaire
la racine d'un arbre binaire
![]() , si l'on supprime la racine, on se retrouve avec deux arbres
, si l'on supprime la racine, on se retrouve avec deux arbres
![]() et
et
![]() , que l'on nomme sous-arbres.
, que l'on nomme sous-arbres.
![]() sera alors représenté par le triplet
sera alors représenté par le triplet
![]() . Pour chaque sous-arbre, on recommence l'opération jusqu'à avoir des
sous-arbres vides qui seront symbolisés par
. Pour chaque sous-arbre, on recommence l'opération jusqu'à avoir des
sous-arbres vides qui seront symbolisés par
![]() . Voici la représentation de l'arbre binaire
. Voici la représentation de l'arbre binaire
![]() de la figure 2.5.
de la figure 2.5.
| 2.1.3. Représentation des graphes |
Nous proposons ici les structures les plus populaires pour représenter un graphe. Très souvent, les performances d'un algorithme sont liées à la structure de graphe employée. En effet, chaque structure est très efficace pour un certain type d'opération, mais est souvent mauvaise pour d'autres. Ainsi, il est impossible d'avoir une structure qui soit la plus efficace pour toutes les opérations. Dans notre étude, nous avons choisi de ne pas favoriser une ou plusieurs opérations en particulier et nous avons opté pour une structure qui a une efficacité à peu près égale pour toutes les opérations de base. Notre structure n'est donc jamais la plus efficace pour un algorithme mais n'est aussi jamais la plus médiocre.
Pour commencer, nous présentons des structures sous forme de matrice qui s'avèrent très intéressantes à manipuler d'un point de vue théorique. Ensuite, nous nous intéressons à une modélisation par listes d'adjacence qui est très similaire à la structure que nous avons utilisée pour coder les algorithmes. Le détail de notre structure est proposé dans l'annexe.
| 2.1.3.1. Matrice d'incidence noeud-arc |
Un graphe
![]() peut être représenté par une matrice
peut être représenté par une matrice
![]() de dimension
de dimension
![]() , dite matrice d'incidence noeud-arc, pouvant contenir uniquement les valeurs
, dite matrice d'incidence noeud-arc, pouvant contenir uniquement les valeurs
![]() ,
,
![]() et
et
![]() . Chaque ligne de la matrice est associée à un noeud et chaque colonne
à un arc. Ainsi, une composante indique la relation qu'il existe entre un noeud
. Chaque ligne de la matrice est associée à un noeud et chaque colonne
à un arc. Ainsi, une composante indique la relation qu'il existe entre un noeud
![]() et un arc
et un arc
![]() . Pour chaque composante
. Pour chaque composante
![]() de la matrice
de la matrice
![]() , on a:
, on a:
Pour exemple, voici la représentation par matrice d'incidence du graphe de la figure 2.1.
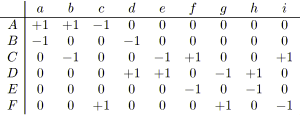
La structure de cette matrice est assez particulière. Seulement
![]() des
des
![]() composantes sont non nulles. Elle occupe donc beaucoup de place en mémoire. En
outre, son utilisation n'apporte que rarement (dans le cas où la matrice elle même a
de l'intérêt) de bons résultats au niveau des algorithmes. En effet, rien que
le parcours du graphe s'avère difficile. Cependant, cette matrice a des
propriétés mathématiques très intéressantes, notamment le fait
qu'elle soit unimodulaire.
composantes sont non nulles. Elle occupe donc beaucoup de place en mémoire. En
outre, son utilisation n'apporte que rarement (dans le cas où la matrice elle même a
de l'intérêt) de bons résultats au niveau des algorithmes. En effet, rien que
le parcours du graphe s'avère difficile. Cependant, cette matrice a des
propriétés mathématiques très intéressantes, notamment le fait
qu'elle soit unimodulaire.
Soit
![]() une matrice
une matrice
![]() .
.
![]() est dite unimodulaire si les conditions suivantes sont vérifiées.
est dite unimodulaire si les conditions suivantes sont vérifiées.
-
 est à composantes entières.
est à composantes entières.
-
est de rang maximal (i.e. de rang
 ).
).
- Toute sous-matrice carrée de
a un déterminant égal à
 ,
,
 ou
ou
 .
.
Le résultat intéressant de cette unimodularité est le suivant.
![]() est unimodulaire si et seulement si toute solution de base du système
linéaire
est unimodulaire si et seulement si toute solution de base du système
linéaire
![]() , avec
, avec
![]() , est entière lorsque
, est entière lorsque
![]() est un vecteur d'entiers. Autrement dit, la résolution d'un programme
linéaire de la forme:
est un vecteur d'entiers. Autrement dit, la résolution d'un programme
linéaire de la forme:
avec la méthode du Simplex fournit une solution optimale à composantes
entières pour tout vecteur d'entiers
![]() , à condition bien entendu que le problème soit borné et
possède au moins une solution réalisable.
, à condition bien entendu que le problème soit borné et
possède au moins une solution réalisable.
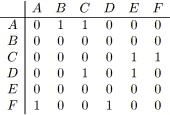
| 2.1.3.2. Matrice d'adjacence noeud-noeud |
Un graphe
![]() peut être représenté par une matrice
peut être représenté par une matrice
![]() de dimension
de dimension
![]() , dite matrice d'adjacence noeud-noeud, pouvant contenir uniquement les valeurs
, dite matrice d'adjacence noeud-noeud, pouvant contenir uniquement les valeurs
![]() et
et
![]() . Chaque ligne et chaque colonne de la matrice est associée à un noeud.
Ainsi, une composante indique la relation qu'il existe entre deux noeuds
. Chaque ligne et chaque colonne de la matrice est associée à un noeud.
Ainsi, une composante indique la relation qu'il existe entre deux noeuds
![]() et
et
![]() . Pour chaque composante
. Pour chaque composante
![]() de la matrice
de la matrice
![]() , on a:
, on a:
Dans cette matrice, seulement
![]() des
des
![]() composantes sont non nulles. Cette représentation sera donc efficace au niveau
de l'espace mémoire utilisé lorsque le graphe est suffisamment dense (i.e. lorsqu'il
y a suffisamment d'arcs). Néanmoins, cette représentation permet d'implémenter
assez facilement les algorithmes. Son utilisation apporte plus souvent de bons résultats au
niveau des algorithmes que la matrice d'incidence, en particulier si le graphe est dense.
Malheureusement, il faut noter une simplification importante dans la modélisation: on
suppose qu'il n'y a pas d'arc multiple dans le graphe. Pour exemple, voici la représentation
par matrice d'incidence du graphe de la figure 2.1.
composantes sont non nulles. Cette représentation sera donc efficace au niveau
de l'espace mémoire utilisé lorsque le graphe est suffisamment dense (i.e. lorsqu'il
y a suffisamment d'arcs). Néanmoins, cette représentation permet d'implémenter
assez facilement les algorithmes. Son utilisation apporte plus souvent de bons résultats au
niveau des algorithmes que la matrice d'incidence, en particulier si le graphe est dense.
Malheureusement, il faut noter une simplification importante dans la modélisation: on
suppose qu'il n'y a pas d'arc multiple dans le graphe. Pour exemple, voici la représentation
par matrice d'incidence du graphe de la figure 2.1.
| 2.1.3.3. Listes d'adjacence |
L'un des inconvénients de la représentation sous forme de matrice est la
difficulté à connaître pour un noeud tous les arcs qui lui sont adjacents,
information qui est très utilisée dans les algorithmes. D'où la
modélisation dite par listes d'adjacence. Tous les arcs sont stockés dans une
liste, tous les noeuds dans une autre et chaque noeud
![]() possède deux listes: une pour les arcs entrants (i.e.
possède deux listes: une pour les arcs entrants (i.e.
![]() ), une autre pour les arcs sortants (i.e.
), une autre pour les arcs sortants (i.e.
![]() ). La figure 2.6 montre comment représenter le graphe de la figure 2.1.
). La figure 2.6 montre comment représenter le graphe de la figure 2.1.
 |
| Figure 2.6: Un exemple de représentation par listes d'adjacence. |
Plusieurs remarques pratiques peuvent être faites sur cette figure. Tout d'abord, pour les représentations par matrice, nous n'avons parlé que de la représentation de la structure du graphe en omettant volontairement la représentation des informations portées par les noeuds ou par les arcs, puisque nous n'allons pas utiliser ces structures en pratique.
Pour la représentation par listes d'adjacence, les informations seront stockées
au niveau des identifiants, par exemple pour le noeud
![]() (resp. l'arc
(resp. l'arc
![]() ), ses données seront stockées à l'endroit noté
), ses données seront stockées à l'endroit noté
![]() (respectivement
(respectivement
![]() ) sur la figure. Ainsi les listes des arcs entrants ou sortants ne contiennent que des
références sur les arcs afin d'éviter toute redondance inutile d'information.
) sur la figure. Ainsi les listes des arcs entrants ou sortants ne contiennent que des
références sur les arcs afin d'éviter toute redondance inutile d'information.
Il faut également noter que les listes utilisées pour cette structure peuvent être de simples tableaux (à condition que le graphe soit statique, i.e. pas d'ajout ou de suppression d'arcs ou de noeuds), des listes chaînées (à condition de limiter la suppression d'arcs ou de noeuds) ou bien des structures arborescentes (qui permettent efficacement l'ajout ou la suppression d'arcs ou de noeuds).
| 2.1.4. Algorithme de Minty |
L'algorithme que nous présentons ici est basé sur le lemme de Minty (cf. [Minty61]). Minty propose d'associer une couleur à chaque arc d'un graphe parmi quatre (généralement vert, noir, bleu et rouge). Il démontre qu'une recherche basée sur une telle coloration conduit toujours à un cycle ou à un cocycle avec des propriétés bien particulières. L'intérêt de l'algorithme est que suivant la manière de colorer les arcs, on obtient des algorithmes pour rechercher différents types de cycle ou de cocycle.
| 2.1.4.1. Lemme de Minty |
Soit un graphe
![]() avec les arcs colorés en vert, noir, bleu et rouge. Minty a
démontré qu'une et une seule des propositions suivantes est vérifiée
pour tout arc
avec les arcs colorés en vert, noir, bleu et rouge. Minty a
démontré qu'une et une seule des propositions suivantes est vérifiée
pour tout arc
![]() .
.
- L'arc
 appartient à un cycle constitué (excepté
) seulement d'arcs verts, noirs et bleus avec les arcs noirs orientés dans la
même direction que
et les arcs bleus dans la direction opposée. Les arcs verts peuvent être
dans n'importe quel sens.
appartient à un cycle constitué (excepté
) seulement d'arcs verts, noirs et bleus avec les arcs noirs orientés dans la
même direction que
et les arcs bleus dans la direction opposée. Les arcs verts peuvent être
dans n'importe quel sens.
- L'arc
appartient à un cocycle constitué (excepté
) seulement d'arcs rouges, noirs et bleus avec les arcs noirs orientés dans la
même direction que
et les arcs bleus dans la direction opposée. Les arcs rouges peuvent être
dans n'importe quel sens.
La preuve de ce lemme peut être faite par la justification de l'algorithme de recherche d'un tel cycle ou cocycle exposé dans la section qui suit.
| 2.1.4.2. Algorithme |
Nous exposons ici une méthode pour trouver un cycle ou un cocycle d'après la
coloration de Minty pour un arc donné
![]() du graphe
du graphe
![]() . L'algorithme 2.1 parcours et marque les noeuds de
. L'algorithme 2.1 parcours et marque les noeuds de
![]() un par un en partant de
un par un en partant de
![]() . Deux ensembles de noeuds
. Deux ensembles de noeuds
![]() et
et
![]() sont nécessaires pour cette opération.
sont nécessaires pour cette opération.
![]() contient les noeuds marqués pendant le parcours et
contient les noeuds marqués pendant le parcours et
![]() contient les noeuds marqués pendant le parcours susceptibles de conduire
à des noeuds non marqués.
contient les noeuds marqués pendant le parcours susceptibles de conduire
à des noeuds non marqués.
Le parcours d'un noeud à l'autre se fait en utilisant les arcs verts dans n'importe quel
sens, les arcs noirs dans le sens direct et les arcs bleus dans le sens indirect. Si le noeud
![]() est atteint, alors il existe une chaîne de
est atteint, alors il existe une chaîne de
![]() à
à
![]() et donc un cycle contenant
et donc un cycle contenant
![]() qui correspond à la première proposition du lemme. L'algorithme
nécessite alors une fonction
qui correspond à la première proposition du lemme. L'algorithme
nécessite alors une fonction
![]() qui indique pour chaque noeud marqué l'arc qui a permis d'y accéder,
cela permettra de construire le cycle détecté.
qui indique pour chaque noeud marqué l'arc qui a permis d'y accéder,
cela permettra de construire le cycle détecté.
Si
![]() ne peut pas être marqué,
ne peut pas être marqué,
![]() est le cocycle qui sépare
est le cocycle qui sépare
![]() des noeuds non marqués de
des noeuds non marqués de
![]() . Ce cocycle correspond à la deuxième proposition du lemme. En effet, si
. Ce cocycle correspond à la deuxième proposition du lemme. En effet, si
![]() contenait un arc vert, alors un autre noeud aurait dû être marqué.
De manière similaire, si
contenait un arc vert, alors un autre noeud aurait dû être marqué.
De manière similaire, si
![]() contenait un arc noir dans le sens opposé à
contenait un arc noir dans le sens opposé à
![]() dans le cocycle ou un arc bleu dans le même sens que
dans le cocycle ou un arc bleu dans le même sens que
![]() dans le cocycle, alors un autre noeud aurait dû être marqué.
dans le cocycle, alors un autre noeud aurait dû être marqué.
Algorithme 2.1: cycleMinty(arc
 ,graphe
,cycle
,graphe
,cycle
 ,cocycle
,cocycle
 )
)


 ;
;
 ;
;

 ;
;
tant que
 et
et
 faire
faire
choisir
 ;
;
 ;
;
pour tout
 tel que
tel que
 est vert ou noir et
est vert ou noir et
 faire
faire
 ;
;
 ;
;
 ;
;
fin pour;
pour tout
 tel que
est vert ou bleu et
faire
tel que
est vert ou bleu et
faire
;
;
;
fin pour;
fin tant que;
si
alors /* Cocycle trouvé. */
construire le cocycle
de
;
sinon /* Cycle trouvé. */
construire le cycle
en utilisant la fonction
à partir de
 ;
;
fin si;
fin algorithme; Enfin, les deux propositions du lemme ne peuvent pas être vraies en même temps.
Pour le prouver, supposons les deux propositions vérifiées. L'arc
![]() appartient donc à la fois au cycle et au cocycle. Dans le cocycle, il existe
forcément un arc
appartient donc à la fois au cycle et au cocycle. Dans le cocycle, il existe
forcément un arc
![]() qui appartient au cycle comme
qui appartient au cycle comme
![]() (en effet, le cycle contenant
(en effet, le cycle contenant
![]() doit forcément repasser dans le cocycle). Cet arc
doit forcément repasser dans le cocycle). Cet arc
![]() ne peut être ni rouge, ni vert. En outre, s'il était bleu, il serait
opposé à
ne peut être ni rouge, ni vert. En outre, s'il était bleu, il serait
opposé à
![]() dans le cycle mais aussi dans le cocycle, ce qui est impossible puisque deux arcs de
même sens dans un cycle sont forcément opposés dans un cocycle. Pour la
même raison,
dans le cycle mais aussi dans le cocycle, ce qui est impossible puisque deux arcs de
même sens dans un cycle sont forcément opposés dans un cocycle. Pour la
même raison,
![]() ne peut pas être noir. D'où la contradiction.
ne peut pas être noir. D'où la contradiction.
Cet algorithme étant un simple parcours de graphe, il permet de détecter un cycle
ou un cocycle de Minty en
![]() opérations.
opérations.
| 2.1.4.3. Détection de cycle, circuit, cocycle et cocircuit |
L'algorithme de Minty est très intéressant puisqu'en choisissant judicieusement la coloration des arcs, il permet la recherche de différents types de cycle ou de cocycle. En général, il permet la détection d'un cycle ou d'un cocycle dont les propriétés peuvent s'exprimer indépendamment sur chaque arc. Par contre une propriété globale à tout le cycle ou le cocycle, comme par exemple la longueur d'un cycle, ne peut pas être traduite en termes de couleurs sur les arcs. Voici quelques colorations simples qui permettent les recherches les plus classiques.
- Colorer tous les arcs en vert permet de rechercher un cycle contenant un arc donné
(tous les arcs peuvent être employés pour trouver une chaîne de
 à
).
à
).
- Colorer tous les arcs en rouge permet de déterminer le cocycle du noeud source d'un arc
donné
(aucun arc ne peut être employé pour trouver une chaîne de
à
).
- Colorer tous les arcs en noir permet de rechercher un circuit contenant un arc donné
(si un cycle est trouvé, tous ses arcs sont noirs et donc dans le même
sens que
). Si un tel circuit n'existe pas, alors un cocircuit est trouvé contenant l'arc
(si un cocycle est trouvé, tous ces arcs sont noirs et donc dans le même
sens que
).
| 2.1.5. Conclusion |
Dans la suite du document, les chaînes, les chemins, les cycles et les cocycles seront toujours considérés élémentaires. Nous rappelons également que nous utiliserons sans le préciser la représentation vectorielle des fonctions quand cela s'avérera nécessaire.
Nous supposons également que les graphes que nous étudions sont toujours connexes (s'ils ne le sont pas, il suffit de considérer chaque composante connexe séparément) et peuvent être des multigraphes (comme nous le verrons dans une section suivante, il est dans la nature même des graphes représentant des problèmes de synchronisation hypermédia de posséder des arcs multiples).
| 2.2. FLOT ET TENSION |
| 2.2.1. Flot |
Le flot est une notion très importante en théorie des graphes puisqu'elle permet de représenter des flux (e.g. l'information dans un réseau de télécommunication, les passagers dans un réseau de transport, les matières et les produits dans une chaîne de production...). De nombreux problèmes autour de ce concept ont été modélisés et étudiés, et par conséquent de nombreuses méthodes de résolution et d'importants résultats théoriques sont disponibles. Comme nous l'expliquons dans la seconde partie du document, pour résoudre des problèmes de tension, nous nous sommes fortement inspirés d'algorithmes conçus pour des problèmes de flot. En outre, la relation très particulière qui lie le flot et la tension est telle que la plupart des méthodes pour résoudre les problèmes de flot (respectivement de tension) manipulent la tension (respectivement le flot). Il semble donc important de rappeler ici quelques définitions et propriétés élémentaires sur le flot.
| 2.2.1.1. Définitions |
On appelle flot une fonction
![]() qui associe à chaque arc de
qui associe à chaque arc de
![]() une valeur (réelle ou entière). La particularité de cette
fonction est que, pour chaque noeud
une valeur (réelle ou entière). La particularité de cette
fonction est que, pour chaque noeud
![]() de
de
![]() , on a la propriété suivante, appelée conservation des
flots.
, on a la propriété suivante, appelée conservation des
flots.
(2.1)
Autrement dit,
![]() est un flot si et seulement si, pour chaque noeud, la somme des flots sur les arcs
entrants est égale à la somme des flots sur les arcs sortants. Par exemple, si
est un flot si et seulement si, pour chaque noeud, la somme des flots sur les arcs
entrants est égale à la somme des flots sur les arcs sortants. Par exemple, si
![]() représente un circuit électrique, l'intensité du courant est un
flot sur
représente un circuit électrique, l'intensité du courant est un
flot sur
![]() . Ainsi, si on note
. Ainsi, si on note
![]() la matrice d'incidence de
la matrice d'incidence de
![]() , la formule 2.1 peut s'écrire:
, la formule 2.1 peut s'écrire:
(2.2)
| 2.2.1.2. Propriétés élémentaires |
Voici quelques propriétés élémentaires sur le flot très simplement vérifiables.
- Si
 est un flot et
est un flot et
 un réel, alors
un réel, alors
 est un flot.
est un flot.
- Si
 et
et
 sont des flots, alors
sont des flots, alors
 est un flot.
est un flot.
- Le seul flot possible sur un arbre est le flot
 .
.
- Le vecteur qui représente un cycle est un flot (il est très facile de vérifier la conservation des flots).
| 2.2.1.3. Base de cycles |
On dit que
![]() vecteurs
vecteurs
![]() ,
,
![]() ...
...
![]() de
de
![]() sont dépendants s'il existe
sont dépendants s'il existe
![]() coefficients non tous nuls
coefficients non tous nuls
![]() ,
,
![]() ...
...
![]() dans
dans
![]() tels que:
tels que:
(2.3)
A l'inverse, si la relation 2.3 n'est vérifiée que pour tous les
![]() nuls, alors les vecteurs
nuls, alors les vecteurs
![]() ,
,
![]() ...
...
![]() sont dits indépendants.
sont dits indépendants.
Une base de vecteurs est un ensemble de vecteurs indépendants tel que tout
vecteur
![]() de
de
![]() est une combinaison linéaire des vecteurs de la base, i.e. pour tout
vecteur
est une combinaison linéaire des vecteurs de la base, i.e. pour tout
vecteur
![]() il existe des coefficients
il existe des coefficients
![]() ,
,
![]() ...
...
![]() tels que:
tels que:
(2.4)
Les cycles pouvant être considérés comme des vecteurs, il est possible de
construire une base de cycles. Nous rappelons ici une manière simple d'obtenir une
telle base. Considérons un arbre recouvrant
![]() du graphe
du graphe
![]() . Il ne contient pas de cycles, mais tout ajout dans l'arbre d'un arc
. Il ne contient pas de cycles, mais tout ajout dans l'arbre d'un arc
![]() de
de
![]() (i.e. un arc qui n'est pas déjà dans
(i.e. un arc qui n'est pas déjà dans
![]() ) engendre un cycle
) engendre un cycle
![]() . Si on considère l'ensemble des cycles
. Si on considère l'ensemble des cycles
![]() engendré en ajoutant séparément chaque arc
engendré en ajoutant séparément chaque arc
![]() de
de
![]() dans l'arbre
dans l'arbre
![]() , on obtient un ensemble
, on obtient un ensemble
![]() de cycles indépendants (car chaque cycle
de cycles indépendants (car chaque cycle
![]() possède un arc qu'aucun autre ne possède, c'est
possède un arc qu'aucun autre ne possède, c'est
![]() ). Il faut s'assurer maintenant que tout cycle de
). Il faut s'assurer maintenant que tout cycle de
![]() est une combinaison linéaire des cycles de
est une combinaison linéaire des cycles de
![]() .
.
Considérons un flot
![]() . Soit
. Soit
![]() .
.
![]() est une combinaison linéaire de flots donc un flot. La différence
est une combinaison linéaire de flots donc un flot. La différence
![]() est également un flot. Or, pour tout arc
est également un flot. Or, pour tout arc
![]() de
de
![]() ,
,
![]() puisque l'arc
puisque l'arc
![]() n'apparaît que dans le cycle
n'apparaît que dans le cycle
![]() . Le flot
. Le flot
![]() étant nul pour tout arc n'appartenant pas à
étant nul pour tout arc n'appartenant pas à
![]() , il représente donc un flot défini strictement sur
, il représente donc un flot défini strictement sur
![]() , or tout flot sur un arbre est nul donc
, or tout flot sur un arbre est nul donc
![]() .
.
En conclusion, tout flot est une combinaison linéaire de la base
![]() . Un cycle pouvant être considéré comme un flot, tout cycle est une
combinaison linéaire de
. Un cycle pouvant être considéré comme un flot, tout cycle est une
combinaison linéaire de
![]() . On remarque également que la base
. On remarque également que la base
![]() contient
contient
![]() cycles (car
cycles (car
![]() possède
possède
![]() arcs). Enfin, l'algorithme pour construire
arcs). Enfin, l'algorithme pour construire
![]() est détaillé dans l'annexe.
est détaillé dans l'annexe.
| 2.2.2. Tension |
Nous présentons maintenant la notion de tension dont nous verrons par la suite la pertinence pour modéliser des problèmes de synchronisation hypermédia. La plupart des résultats théoriques liés à ce concept proviennent du développement de méthodes de résolution pour des problèmes de flot. L'utilisation de la tension pour modéliser des problèmes dans les graphes est beaucoup moins répandue que pour le flot, cependant il existe de nombreux problèmes que la tension peut représenter (e.g. [Rockafellar84]). Notamment dans le domaine de la planification, la tension peut être assimilée à une durée comme nous le verrons à la section suivante. Nous rappelons ici quelques définitions et propriétés élémentaires sur la tension (issues de [Berge62]) utiles pour notre étude.
| 2.2.2.1. Définitions |
On désigne par potentiel une fonction
![]() qui associe à chaque noeud de
qui associe à chaque noeud de
![]() une valeur (entière ou réelle). Associée à ce potentiel,
on peut définir une fonction
une valeur (entière ou réelle). Associée à ce potentiel,
on peut définir une fonction
![]() appelée tension qui attribue à chaque arc
appelée tension qui attribue à chaque arc
![]() de
de
![]() une valeur de la manière suivante.
une valeur de la manière suivante.
(2.5)
Une fonction est donc une tension s'il est possible de lui associer un potentiel. Ces notions
de tension et de potentiel peuvent être comparées à celles d'un circuit
électrique. Si on note
![]() la matrice d'incidence de
la matrice d'incidence de
![]() , la définition 2.5 de la tension peut se traduire:
, la définition 2.5 de la tension peut se traduire:
(2.6)
| 2.2.2.2. Propriétés élémentaires |
Voici quelques propriétés élémentaires sur la tension très simplement vérifiables.
- Si
 est une tension et
un réel, alors
est une tension et
un réel, alors
 est une tension.
est une tension.
- Si
 et
et
 sont des tensions, alors
sont des tensions, alors
 est une tension.
est une tension.
- Toute fonction qui associe à chaque arc d'un arbre une valeur est une tension.
- Le vecteur qui représente un cocycle est une tension (il est très facile d'y associer un potentiel).
Tout vecteur tension
![]() et tout vecteur flot
et tout vecteur flot
![]() sur un graphe
sur un graphe
![]() sont orthogonaux, i.e. le produit scalaire
sont orthogonaux, i.e. le produit scalaire
![]() (d'après la définition 2.6, il existe un potentiel
(d'après la définition 2.6, il existe un potentiel
![]() tel que
tel que
![]() où
où
![]() est la matrice d'incidence de
est la matrice d'incidence de
![]() , donc
, donc
![]() ). Il est alors possible d'en déduire une nouvelle définition de la
tension.
). Il est alors possible d'en déduire une nouvelle définition de la
tension.
(2.7)
Preuve:
(![]() )
)
![]() est orthogonale à tout flot sur
est orthogonale à tout flot sur
![]() et donc en particulier à tout cycle (le vecteur cycle représentant un
flot).
et donc en particulier à tout cycle (le vecteur cycle représentant un
flot).
(![]() ) Si l'égalité est vérifiée, un potentiel
) Si l'égalité est vérifiée, un potentiel
![]() peut être associé à
peut être associé à
![]() . Dans le cas contraire, cela signifierait qu'il existe pour un arc
. Dans le cas contraire, cela signifierait qu'il existe pour un arc
![]() une chaîne
une chaîne
![]() de
de
![]() à
à
![]() pour laquelle
pour laquelle
![]() . Or si l'on considère le cycle
. Or si l'on considère le cycle
![]() formé de
formé de
![]() et de
et de
![]() , on doit avoir
, on doit avoir
![]() , d'où la contradiction.
, d'où la contradiction.
![]()
Il n'est pas nécessaire de vérifier l'égalité pour tous les cycles
du graphe pour confirmer une tension. En effet, si l'égalité est
vérifiée pour une base de cycles
![]() , i.e.
, i.e.
![]() , alors toute combinaison linéaire, donc tout cycle
, alors toute combinaison linéaire, donc tout cycle
![]() , vérifie
, vérifie
![]() . La définition suivante suffit donc à caractériser une tension.
. La définition suivante suffit donc à caractériser une tension.
(2.8)
| 2.2.2.3. Base de cocycles |
De manière analogue aux cycles, nous rappelons ici une manière simple d'obtenir
une base de cocycles. Considérons un arbre recouvrant
![]() du graphe
du graphe
![]() . En supprimant un arc
. En supprimant un arc
![]() de l'arbre, on fait apparaître deux composantes connexes. Notons
de l'arbre, on fait apparaître deux composantes connexes. Notons
![]() la composante qui contient le noeud source de
la composante qui contient le noeud source de
![]() et notons
et notons
![]() le cocycle de
le cocycle de
![]() dans le graphe
dans le graphe
![]() . Si on considère l'ensemble des cocycles
. Si on considère l'ensemble des cocycles
![]() engendré en supprimant séparément chaque arc
engendré en supprimant séparément chaque arc
![]() de
de
![]() , on obtient un ensemble
, on obtient un ensemble
![]() de cocycles indépendants (car chaque cocycle
de cocycles indépendants (car chaque cocycle
![]() possède un arc qu'aucun autre ne possède, c'est
possède un arc qu'aucun autre ne possède, c'est
![]() ). Il faut s'assurer maintenant que tout cocycle de
). Il faut s'assurer maintenant que tout cocycle de
![]() est une combinaison linéaire des cocycles de
est une combinaison linéaire des cocycles de
![]() .
.
Considérons une tension
![]() . Soit
. Soit
![]() .
.
![]() est une combinaison linéaire de tensions donc une tension. La différence
est une combinaison linéaire de tensions donc une tension. La différence
![]() est également une tension. Or, pour tout arc
est également une tension. Or, pour tout arc
![]() de
de
![]() ,
,
![]() puisque l'arc
puisque l'arc
![]() n'apparaît que dans le cocycle
n'apparaît que dans le cocycle
![]() . La tension
. La tension
![]() étant nulle pour tout arc de
étant nulle pour tout arc de
![]() , tous les noeuds de l'arbre et donc du graphe ont le même potentiel. Donc
, tous les noeuds de l'arbre et donc du graphe ont le même potentiel. Donc
![]() .
.
En conclusion, toute tension est une combinaison linéaire de la base
![]() . Un cocycle pouvant être considéré comme une tension, tout cocycle
est une combinaison linéaire de
. Un cocycle pouvant être considéré comme une tension, tout cocycle
est une combinaison linéaire de
![]() . On remarque également que la base
. On remarque également que la base
![]() contient
contient
![]() cocycles (car
cocycles (car
![]() possède
possède
![]() arcs).
arcs).
| 2.3. MODELISATION SOUS FORME DE GRAPHE TEMPOREL |
| 2.3.1. Définition d'un graphe temporel |
Un graphe
![]() est dit temporel lorsque ses noeuds représentent des
événements et ses arcs des contraintes de précédence entre deux noeuds,
i.e. l'arc
est dit temporel lorsque ses noeuds représentent des
événements et ses arcs des contraintes de précédence entre deux noeuds,
i.e. l'arc
![]() signifie que l'événement modélisé par
signifie que l'événement modélisé par
![]() doit se produire avant l'événement modélisé par
doit se produire avant l'événement modélisé par
![]() .
.
Un graphe temporel est également accompagné d'un vecteur
![]() , appelé durée, qui associe à chaque arc
, appelé durée, qui associe à chaque arc
![]() une durée
une durée
![]() et d'un vecteur
et d'un vecteur
![]() , appelé date, qui associe à chaque noeud
, appelé date, qui associe à chaque noeud
![]() une date
une date
![]() . Un graphe temporel peut également être muni d'un vecteur
. Un graphe temporel peut également être muni d'un vecteur
![]() , appelé capacité, qui associe à chaque arc
, appelé capacité, qui associe à chaque arc
![]() un ensemble
un ensemble
![]() , indiquant les valeurs autorisées pour la durée
, indiquant les valeurs autorisées pour la durée
![]() .
.
| Figure 2.7: Modélisation d'un simple objet multimédia par un graphe temporel. |
Un objet multimédia
![]() de durée idéale
de durée idéale
![]() et d'ensemble de tolérance
et d'ensemble de tolérance
![]() sera donc représenté dans un graphe temporel par ses
événements de début
sera donc représenté dans un graphe temporel par ses
événements de début
![]() et de fin
et de fin
![]() reliés par un arc indiquant la relation de précédence entre
reliés par un arc indiquant la relation de précédence entre
![]() et
et
![]() (cf. figure 2.7) et portant toutes les informations associées à l'objet
telles que la durée idéale
(cf. figure 2.7) et portant toutes les informations associées à l'objet
telles que la durée idéale
![]() et l'ensemble de tolérance
et l'ensemble de tolérance
![]() .
.
En outre, un graphe temporel doit posséder un seul noeud source
![]() et un seul noeud puits
et un seul noeud puits
![]() , chacun représentant respectivement les événements de
début et de fin du scénario complet modélisé. Il est possible de fixer
la date de l'événement
, chacun représentant respectivement les événements de
début et de fin du scénario complet modélisé. Il est possible de fixer
la date de l'événement
![]() à
à
![]() , la date de
, la date de
![]() représentera ainsi la durée totale de présentation du
scénario. Et si l'on connaît le vecteur durée, on peut en déduire le
vecteur date, et réciproquement.
représentera ainsi la durée totale de présentation du
scénario. Et si l'on connaît le vecteur durée, on peut en déduire le
vecteur date, et réciproquement.
A partir du principe qu'un arc représente une contrainte de précédence
entre deux objets multimédia, la figure 2.8b modélise sous forme de graphe temporel
un exemple de scénario illustré par la figure 2.8a (une flèche entre deux
objets signifie que la fin de l'objet source coïncide avec le début de l'objet cible).
Des simplifications peuvent être apportées à ce graphe temporel: deux
événements liés par une contrainte de précédence de
capacité
![]() signifient qu'ils sont confondus (cf. figure 2.8c).
signifient qu'ils sont confondus (cf. figure 2.8c).
 |
| Figure 2.8: Un exemple de modélisation d'un scénario par un graphe temporel. |
| 2.3.2. Relations temporelles modélisables |
Il est relativement simple d'exprimer les relations d'Allen par un graphe temporel (cf. figure
2.9). Nous ne prenons pas en compte dans cette représentation les durées et les
événements imprévisibles. Nous supposons que la planification doit
établir une durée pour tous les objets multimédia et une date relative au
début de la présentation du document pour tous les événements. En
outre, la disjonction qui est préconisée sur les relations d'Allen n'est pas toujours
représentable. Soulignons deux disjonctions modélisables importantes, nous les
nommons
![]() et
et
![]() .
.
![]() signifie que les objets
signifie que les objets
![]() et
et
![]() démarrent en même temps, ce qui s'exprime par
démarrent en même temps, ce qui s'exprime par
![]() .
.
![]() signifie de façon similaire que
signifie de façon similaire que
![]() et
et
![]() se terminent en même temps, et s'exprime par
se terminent en même temps, et s'exprime par
![]() . Comme le souligne [Allen91], les possibilités de
disjonctions entre deux relations d'Allen sont au nombre de
. Comme le souligne [Allen91], les possibilités de
disjonctions entre deux relations d'Allen sont au nombre de
![]() , mais il explique également que seulement
, mais il explique également que seulement
![]() sont modélisables par une représentation sous forme
d'événements comme la nôtre.
sont modélisables par une représentation sous forme
d'événements comme la nôtre.
 |
| Figure 2.9: Modélisation des relations d'Allen par un graphe temporel. |
| 2.4. PROBLEMES DE TENSION |
Nous allons montrer ici que les durées
![]() portées par les arcs correspondent à la notion de tension définie
à la section 2.2. Une fois établi le fait que les problèmes que nous tentons
de résoudre sont des problèmes de tension, nous en exposons les deux principaux, la
tension compatible et la tension de coût minimal, qui modélisent les
problématiques de synchronisation hypermédia soulignées au
portées par les arcs correspondent à la notion de tension définie
à la section 2.2. Une fois établi le fait que les problèmes que nous tentons
de résoudre sont des problèmes de tension, nous en exposons les deux principaux, la
tension compatible et la tension de coût minimal, qui modélisent les
problématiques de synchronisation hypermédia soulignées au
| 2.4.1. Temps et tension |
Supposons un graphe
![]() muni d'un vecteur durée
muni d'un vecteur durée
![]() et d'un vecteur date
et d'un vecteur date
![]() . La durée
. La durée
![]() d'une chaîne
d'une chaîne
![]() entre deux noeuds
entre deux noeuds
![]() et
et
![]() est définie par la somme
est définie par la somme
![]() . Pour un chemin
. Pour un chemin
![]() du noeud
du noeud
![]() au noeud
au noeud
![]() , sa durée se résume à
, sa durée se résume à
![]() . Notons qu'un chemin dans un graphe temporel représente une succession d'objets
multimédia et la durée du chemin représente la durée totale de
présentation de ces objets. La satisfaction des contraintes temporelles par une
planification (i.e. un vecteur durée ou un vecteur date sur
. Notons qu'un chemin dans un graphe temporel représente une succession d'objets
multimédia et la durée du chemin représente la durée totale de
présentation de ces objets. La satisfaction des contraintes temporelles par une
planification (i.e. un vecteur durée ou un vecteur date sur
![]() ) peut être exprimée de la manière suivante: pour chaque paire de
noeuds
) peut être exprimée de la manière suivante: pour chaque paire de
noeuds
![]() et
et
![]() , tous les chemins entre
, tous les chemins entre
![]() et
et
![]() doivent avoir la même durée.
doivent avoir la même durée.
En d'autres termes,
![]() telle que, pour tout chemin
telle que, pour tout chemin
![]() de
de
![]() à
à
![]() ,
,
![]() . Tentons alors de prouver la propriété suivante.
. Tentons alors de prouver la propriété suivante.
Soit un graphe et un vecteur durée
.
telle que, pour tout chemin
de
, si et seulement si
(2.9)
Preuve:
(![]() ) Soit
) Soit
![]() l'ensemble des cycles de
l'ensemble des cycles de
![]() .
.
![]() est une tension dans
est une tension dans
![]() , donc
, donc
![]() ,
,
![]() . Ainsi, un cycle
. Ainsi, un cycle
![]() formé de deux chemins
formé de deux chemins
![]() et
et
![]() de
de
![]() à
à
![]() , e.g.
, e.g.
![]() et
et
![]() , vérifie
, vérifie
![]() . Donc deux chemins de mêmes extrémités sont de même
durée.
. Donc deux chemins de mêmes extrémités sont de même
durée.
(![]() ) Notons
) Notons
![]() la durée des chemins de la source
la durée des chemins de la source
![]() au noeud
au noeud
![]() (tous les chemins de mêmes extrémités sont de même
durée). Soit
(tous les chemins de mêmes extrémités sont de même
durée). Soit
![]() un cycle de
un cycle de
![]() , considérons
, considérons
![]() et
et
![]() deux noeuds consécutifs dans ce cycle. Il y a deux cas possibles:
deux noeuds consécutifs dans ce cycle. Il y a deux cas possibles:
- L'arc
![]() . De la définition d'un graphe temporel, il est toujours possible de trouver un
chemin
. De la définition d'un graphe temporel, il est toujours possible de trouver un
chemin
![]() de
de
![]() à
à
![]() avec la durée
avec la durée
![]() . Le chemin de
. Le chemin de
![]() à
à
![]() passant par
passant par
![]() en utilisant l'arc
en utilisant l'arc
![]() du cycle
du cycle
![]() est également de durée
est également de durée
![]() , et vaut aussi
, et vaut aussi
![]() (cf. figure 2.10). D'après l'hypothèse de départ,
(cf. figure 2.10). D'après l'hypothèse de départ,
![]() .
.
- L'arc
![]() . De manière analogue au premier cas, on trouve que
. De manière analogue au premier cas, on trouve que
![]() .
.
En résumé, on obtient l'égalité
![]() :
:
![]() .
.
Numérotons les arcs du cycle
![]() consécutivement
consécutivement
![]() . En sommant les égalités
. En sommant les égalités
![]() , on obtient:
, on obtient:
![]() . Or les noeuds
. Or les noeuds
![]() et
et
![]() sont confondus, donc
sont confondus, donc
![]() . Le vecteur
. Le vecteur
![]() est donc une tension.
est donc une tension.
![]()
 |
| Figure 2.10: Illustration de la preuve. |
En résumé, le vecteur durée
![]() est une tension. En outre, pour tout arc
est une tension. En outre, pour tout arc
![]() , la durée
, la durée
![]() , le vecteur date
, le vecteur date
![]() est donc un potentiel. Etudions maintenant la relation entre certains problèmes
de tension et la synchronisation hypermédia.
est donc un potentiel. Etudions maintenant la relation entre certains problèmes
de tension et la synchronisation hypermédia.
| 2.4.2. Problème de la tension compatible |
On dit qu'une tension
![]() d'un graphe
d'un graphe
![]() est compatible (ou réalisable) avec une capacité
est compatible (ou réalisable) avec une capacité
![]() si et seulement si, pour tout arc
si et seulement si, pour tout arc
![]() ,
,
![]() . Le problème de la tension compatible consiste à
déterminer une telle tension. Dans le contexte de la synchronisation hypermédia, cela
signifie chercher une durée
. Le problème de la tension compatible consiste à
déterminer une telle tension. Dans le contexte de la synchronisation hypermédia, cela
signifie chercher une durée
![]() pour chaque objet hypermédia
pour chaque objet hypermédia
![]() qui soit dans l'ensemble de tolérance
qui soit dans l'ensemble de tolérance
![]() associé. La résolution de ce problème permet également de
répondre à la question: est-il possible de présenter le document en
associé. La résolution de ce problème permet également de
répondre à la question: est-il possible de présenter le document en
![]() secondes ? Il suffit pour cela d'ajouter un arc de capacité
secondes ? Il suffit pour cela d'ajouter un arc de capacité
![]() entre le noeud source et le noeud puits du graphe, et de tenter de déterminer
une tension compatible sur ce nouveau graphe.
entre le noeud source et le noeud puits du graphe, et de tenter de déterminer
une tension compatible sur ce nouveau graphe.
Au cours de notre étude sur des méthodes de résolution de ce
problème de réalisabilité, nous nous intéresserons au
problème de la tension maximale (ou minimale). Il s'agit, pour un arc donné
![]() d'un graphe
d'un graphe
![]() muni d'une capacité
muni d'une capacité
![]() , de trouver la tension maximale (ou minimale)
, de trouver la tension maximale (ou minimale)
![]() qu'il peut atteindre,
qu'il peut atteindre,
![]() restant compatible avec
restant compatible avec
![]() . Là aussi, en ajoutant un arc de capacité
. Là aussi, en ajoutant un arc de capacité
![]() entre le noeud source et le noeud puits du graphe, il est possible de répondre
à la question: quelle est la durée maximale (ou minimale) de présentation d'un
document hypermédia ? Il suffit pour cela de déterminer la tension maximale (ou
minimale) du nouvel arc.
entre le noeud source et le noeud puits du graphe, il est possible de répondre
à la question: quelle est la durée maximale (ou minimale) de présentation d'un
document hypermédia ? Il suffit pour cela de déterminer la tension maximale (ou
minimale) du nouvel arc.
| 2.4.3. Problème de la tension de coût minimal |
L'un des principaux problèmes liés à la synchronisation hypermédia est tout de même de déterminer une planification de la meilleure qualité possible. Mais avant de tenter une résolution, il faut être capable de formaliser la notion de qualité d'une planification. Pour cela, nous avons choisi d'attribuer un coût (pour l'instant nous le supposerons quelconque) pour chaque arc en fonction de sa tension. Ce coût étant naturellement le plus faible lorsque la tension de l'arc est égale à sa tension idéale (i.e. sa durée idéale). Nous discutons à la section suivante des différents types de fonction de coût pertinents pour la synchronisation hypermédia.
En d'autres termes, pour chaque arc
![]() , on définit un coût sur un graphe
, on définit un coût sur un graphe
![]() comme étant un vecteur
comme étant un vecteur
![]() , qui attribue à chaque arc
, qui attribue à chaque arc
![]() une fonction de coût
une fonction de coût
![]() . Le problème d'optimisation qui se pose alors est de trouver une tension
compatible
. Le problème d'optimisation qui se pose alors est de trouver une tension
compatible
![]() qui minimise la somme totale des coûts, i.e.
qui minimise la somme totale des coûts, i.e.
![]() . Ce problème est appelé le problème de la tension de
coût minimal.
. Ce problème est appelé le problème de la tension de
coût minimal.
| 2.5. QUANTIFIER LA QUALITE D'UNE PRESENTATION |
Comme il l'a déjà été souligné, afin de déterminer la
meilleure planification d'un document hypermédia, il est nécessaire d'en mesurer la
qualité. Pour cela, nous retenons la solution qui consiste à attribuer à
chaque arc
![]() une fonction de coût
une fonction de coût
![]() dépendante de la valeur de la tension
dépendante de la valeur de la tension
![]() , telle que
, telle que
![]() , i.e. le coût de la tension
, i.e. le coût de la tension
![]() est nul si celle-ci est à sa valeur idéale
est nul si celle-ci est à sa valeur idéale
![]() (i.e. l'objet multimédia est planifié à sa durée
idéale). Naturellement, ce coût augmente à mesure que la tension
(i.e. l'objet multimédia est planifié à sa durée
idéale). Naturellement, ce coût augmente à mesure que la tension
![]() s'éloigne de
s'éloigne de
![]() . A travers la littérature, nous avons constaté trois types de coût
pertinents pour représenter la qualité de la planification d'un document
hypermédia.
. A travers la littérature, nous avons constaté trois types de coût
pertinents pour représenter la qualité de la planification d'un document
hypermédia.
| 2.5.1. Pénalité, coûts convexes linéaires par morceaux |
La première idée consiste à affecter à un arc
![]() un coût proportionnel à l'écart entre la tension
un coût proportionnel à l'écart entre la tension
![]() et sa tension idéale
et sa tension idéale
![]() . Ce type de coût a été proposé et traité dans
[Buchanan93b] et [Kim95]. Alors que
[Kim95] propose un coût unitaire identique selon que la tension
soit inférieure ou supérieure à la durée idéale (cf. figure
2.11a), [Buchanan93b] propose de différencier les deux cas (cf.
figure 2.11b). [Kim95] considère même simplement la
fonction
. Ce type de coût a été proposé et traité dans
[Buchanan93b] et [Kim95]. Alors que
[Kim95] propose un coût unitaire identique selon que la tension
soit inférieure ou supérieure à la durée idéale (cf. figure
2.11a), [Buchanan93b] propose de différencier les deux cas (cf.
figure 2.11b). [Kim95] considère même simplement la
fonction
![]() . En résumé, ces approches similaires expriment la fonction de coût
d'un arc
. En résumé, ces approches similaires expriment la fonction de coût
d'un arc
![]() par un coût unitaire
par un coût unitaire
![]() de diminution de la tension et un coût unitaire
de diminution de la tension et un coût unitaire
![]() d'augmentation de la tension d'un arc
d'augmentation de la tension d'un arc
![]() . Cette fonction s'écrit de la manière suivante.
. Cette fonction s'écrit de la manière suivante.
| 2.5.2. Plus d'égalité, coûts convexes dérivables |
La tension optimale obtenue avec le type de coût présenté précédemment peut produire une inégalité entre les objets multimédia (cf. [Kim95]). Autrement dit, certains objets peuvent subir une importante déformation alors que d'autres n'en subissent qu'une légère.
 |
| Figure 2.11: Exemples de coûts convexes pour mesurer la qualité d'une planification hypermédia. |
Afin d'équilibrer ces altérations, i.e. que chacun est à peu près
la même déformation, [Kim95] propose une fonction de la
forme
![]() (cf. figure 2.11c). Nous nous intéresserons donc par la suite à
déterminer une tension optimale avec des fonctions de coût convexes dérivables
quelconques.
(cf. figure 2.11c). Nous nous intéresserons donc par la suite à
déterminer une tension optimale avec des fonctions de coût convexes dérivables
quelconques.
| 2.5.3. Comptabilisation des objets touchés par une déformation |
Un dernier type de coût présenté dans [Medina04]
semble également illustrer la qualité d'un document hypermédia. La
déformation de la durée d'un objet multimédia peut entraîner un temps
d'exécution important au moment de la présentation du document. Une mesure de
qualité qui intéresse donc les auteurs de documents hypermédia est simplement
le nombre d'objets qui ne sont pas planifiés à leur durée idéale.
Autrement dit, la fonction de coût
![]() est de la forme suivante.
est de la forme suivante.
| CONCLUSION |
Nous avons exposé ici une modélisation possible des relations temporelles
d'objets multimédia à synchroniser. Nous avons supposé les ensembles de
tolérance quelconques. Dans notre étude, nous nous limiterons pour l'instant à
des intervalles de tolérance continu (pour tout arc
![]() , un intervalle
, un intervalle
![]() ), simplement parce que les problèmes sont plus faciles à aborder dans le
domaine continu que dans le domaine discret, où la combinatoire peut rapidement devenir trop
importante. Nous choisissons également d'aborder l'étude du problème
d'optimisation avec des fonctions convexes linéaires par morceaux ou simplement
dérivables. Nous n'étudierons pas pour l'instant la minimisation du nombre d'objets
touchés par une déformation dans une planification hypermédia. Cette
modélisation est également de nature discrète.
), simplement parce que les problèmes sont plus faciles à aborder dans le
domaine continu que dans le domaine discret, où la combinatoire peut rapidement devenir trop
importante. Nous choisissons également d'aborder l'étude du problème
d'optimisation avec des fonctions convexes linéaires par morceaux ou simplement
dérivables. Nous n'étudierons pas pour l'instant la minimisation du nombre d'objets
touchés par une déformation dans une planification hypermédia. Cette
modélisation est également de nature discrète.
|